Two-Body Dynamics#
Prepared by: Emmanuel Airiofolo, Joost Hubbard, Ceyda Alan and Angadh Nanjangud
In this lecture we cover the following topics:
Two-Body Dynamics#
Fig. 1 allows us to model the two-body dynamics of two particles \(m_1\) and \(m_2\). Their position vectors from \(O\) are given by \({\bf{r}}_1\) and \({\bf{r}}_2\), respectively. Note that \(O\) is the origin of an inertial reference frame. \(G\) is the center of mass of the two-body system, which is located by \(\bf{r}_G\). The relative position vector from \(m_1\) to \(m_2\) is given by \({\bf{r}}\). The unit vectors \(\hat{\bf{i}}\), \(\hat{\bf{j}}\), and \(\hat{\bf{k}}\) form a right-handed orthonormal system for this inertial frame.
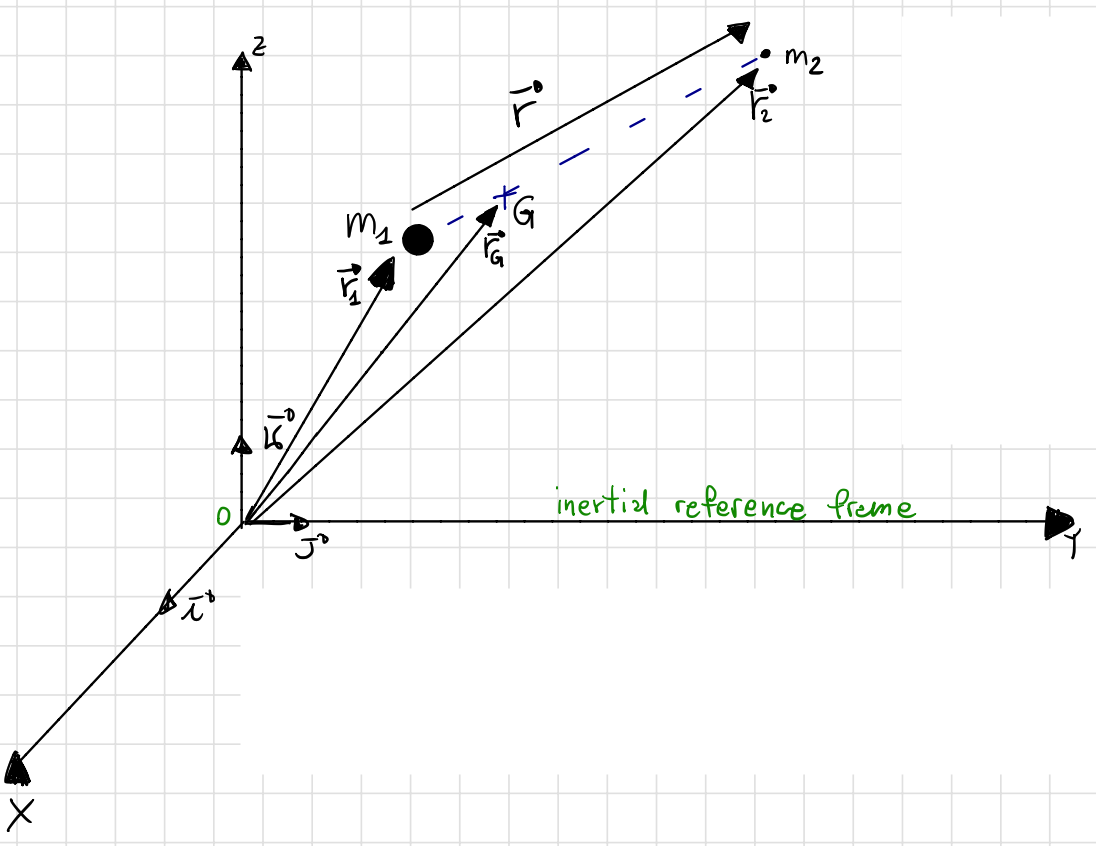
Fig. 1 The two-body dynamics of two particles \(m_1\) and \(m_2\) with position vectors \({\bf{r}}_1\) and \({\bf{r}}_2\) respectively.#
Center of Mass ( G ) and its derivatives#
The center of mass \({\bf{r}}_G\) of the system is given by:
Gravitational Force#
Gravitational forces exists due to the two masses \(m_1\) and \(m_2\) and they act on each of the particles. These forces are shown in the Fig. 2 below as \({\bf{F}}_{12}\) and \({\bf{F}}_{21}\) acting on each of the particles.
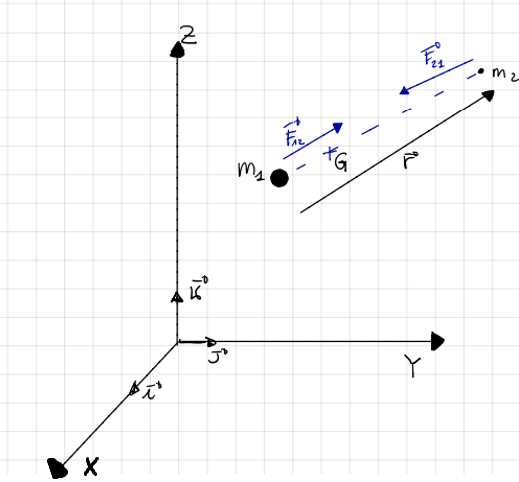
Fig. 2 Free-body diagram showing gravitational force in relative two-body dynamics of \(m_1\) and \(m_2\).#
Here:
\({\bf{F}}_{12}\) represents the force on \(m_1\) exerted by \(m_2\)’s gravitational attraction.
\({\bf{F}}_{21}\) represents the force on \(m_2\) exerted by \(m_1\)’s gravitational attraction.
They are given by:
\(G = 6.672 \times 10^{-11} \ \text{kg}^{-1} \ \text{m}^3 \ \text{s}^{-2}\) (Universal gravitational constant). Note that in (21), \({\bf{r}}\) is relative position vector and can be used to rewrite a position vector along itself as:
Newton’s Second Law (\({\bf F} = m{\bf a}\)) for \(m_1\) is:
Newton’s Second Law for \(m_2\) is:
Adding equations (22) and (23), then substituting for \({\bf{F}}_{12}\) and \({\bf{F}}_{21}\) from (21) gives us:
Noting that the LHS of (24) is the same as the numerator of the acceleration of the center of mass (see the third of equations (20)), we have:
This implies that \(G\) is inertially fixed (i.e., not accelerating) and so it can be chosen as the origin of another inertial reference frame (this is diffefrent from the one written in green in Fig. 1 above). It can also be easily inferred that the absolute (or inertial) velcoity of \(G\) is constant as the acceleration is zero. This is shown below and is consistent with the equation pair (25) above.
Two-Body Relative Dynamics#
To study the relative motion of the two particles, we can subtract the equations of motion for each of the particles as given by (22) and (23). Before doing that, let’s rewrite the equations of motion for each of the particles. Newton’s Second Law for \(m_2\) is given by (23)
Similarly, Newton’s Second Law for \(m_1\), given by (22), can be rewritten as:
Subtracting (27) from (28) gives us the equation of motion for the relative motion of \(m_2\) with respect to \(m_1\) (the resulting is (31)):
Attention
Equation (30) is written more commonly in shorthand using \(\mu\), the gravitational parameter, and gives the relative two-body dynamics equation
Implications of this equation of motion
In most common cases of study/in this text, \(m_1 \gg m_2\). For example, \(m_1\) is \(m_\oplus = 5.974 \times 10^{24} \ \text{kg}\) and \(m_2\) is a spacecraft, \(m_2 \approx 1000 \ \text{kg}\)
This is referred to as a restricted two-body problem.
Equation (30) is a vector ordinary differential equation (ODE). As we are studying the motion in a 3-dimensional coordinate system, this can also be written as a system of 3 scalar second-order ODE. However, they can be further reduced to a system of 6 first-order scalar ODEs or, as shown below, 2 first-order scalar ODEs:
To solve this system as a set of scalar ODEs, we need 6 initial conditions with \(\bf{r_0}\) and \(\bf{v_0}\):
This system of equations can admit, at maximum, 6 independent integrals of motion
The value of the constant is determined by the intial conditions that permit us to solve the ODEs. An integral of motion reduces the degrees-of-freedom of a problem.
Specific Angular Momentum#
The relative angular momentum of \(m_2\) with respect \(m_1\) is
and specific angular momentum is obtained by dividing a body’s relative angular momentum from its mass. In case of \(m_2\), the specific angular momentum is given by
The time derivative of \(\bf{h}\) is
From the two-body dynamics equation (30), we can rewrite the RHS of (41) as:
which tells us that specific angular momentum is a constant.
The implication of constant specific angular momentum is that:
\({\bf{h}}({\bf{r}} , {\bf{\dot r}} , t)\) = \(\textbf{constant}\), which means that \(\bf{h}\) is an integral of motion.
The 3 scalar components of \(\bf h\) are also constants. Or, in mathetmical terminology, we write:
Kepler’s Second Law#
We infer Kepler’s second law based on consequences relating to the nature of constant specific angular momentum vector; specifically, we examine the direction and then the magnitude of the specific angular momentum.
Direction#
Firstly, from
we can determine that
Recall: why is \(\bf{h}\) prependicular to both \(\bf{r}\) and \(\bf{v}\)?
This is because the result of cross-product between two vectors is a third vector that is orthogonal to both vectors.
Thus, \(\bf{r}\) and \(\bf{v}\) are at all times lie in a plane that is perpendicular to \(\bf{h}\). This also means that the motion is planar.
Magnitude#
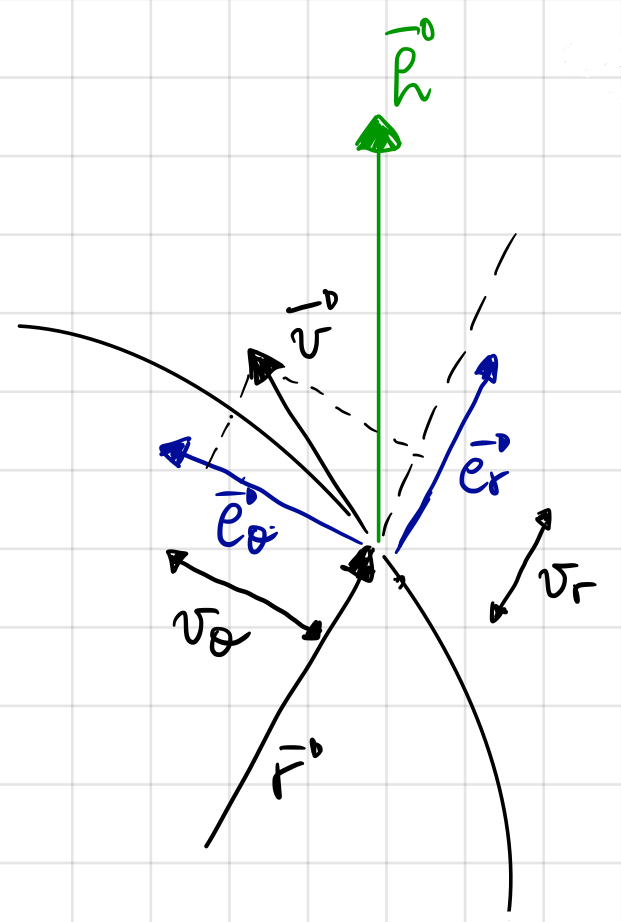
Fig. 3 Magnitude and direction of specific angular momentum.#
From Fig. 3, we can make use of the polar coordinates \({\bf e}_r\) and \({\bf e}_{\theta}\) to write the component form of specific angular momentum.
where we have written the velocity vector \(\bf{v}\) as a sum of its components along the radial and angular directions:
noting that \(v_r\) is the scalar component of the velocity along the radial direction and \(v_\theta\) is the scalar component of the velocity along the angular direction.
The first term on the RHS of the last of Equations (46) is zero because \(\bf{r}\) and \(\bf{v_r}\) are parallel; thus the second term is the only term remaining. As a result, this must be directed along the angular momentum vector \(\bf{h}\). It can also be written along a unit vector along the direction of \(\bf{h}\), called \(\bf{\hat{h}}\):
From Equation (43), we know that the angular momentum \(\bf h\) is constant, which further implies that \(r v_\theta\) is constant. Or, in other words, the scalar \(h\) denoting the magnitude of the specific angular momentum is a constant.
Areal velocity and Kepler’s Second Law#
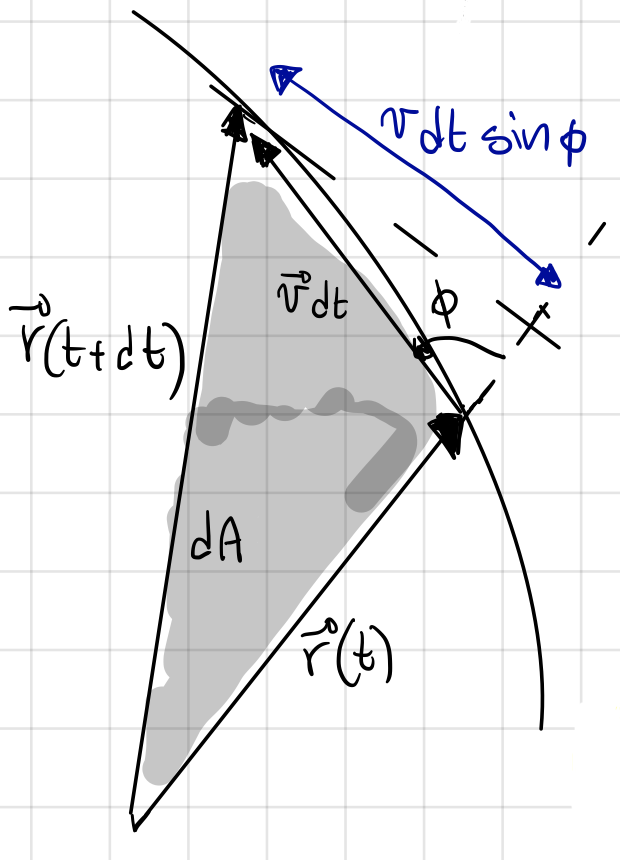
Fig. 4 The grey area is swept by the positon vector in a small interval of time \(\mathrm{d}t\).#
From Fig. 4, we can write the infinitesimal area \(\mathrm{d}A\) swept by \(\bf r\) as
wihch can be further rewritten
or
This is essentially giving us Kepler’s Second Law, which tells us that areal velocity is constant. In other words, it tells us that equal areas are swept in equal intervals of time along the orbit in a body whose dynamics are governed by the simple two-body system described by Equation (31).
Two-body Dynamics in Polar Coordinates#
If the motion is planar, we can use polar coordinates to fully describe it. Consider a situation where this planar motion lies in the x-y plane shown in Fig. 5.
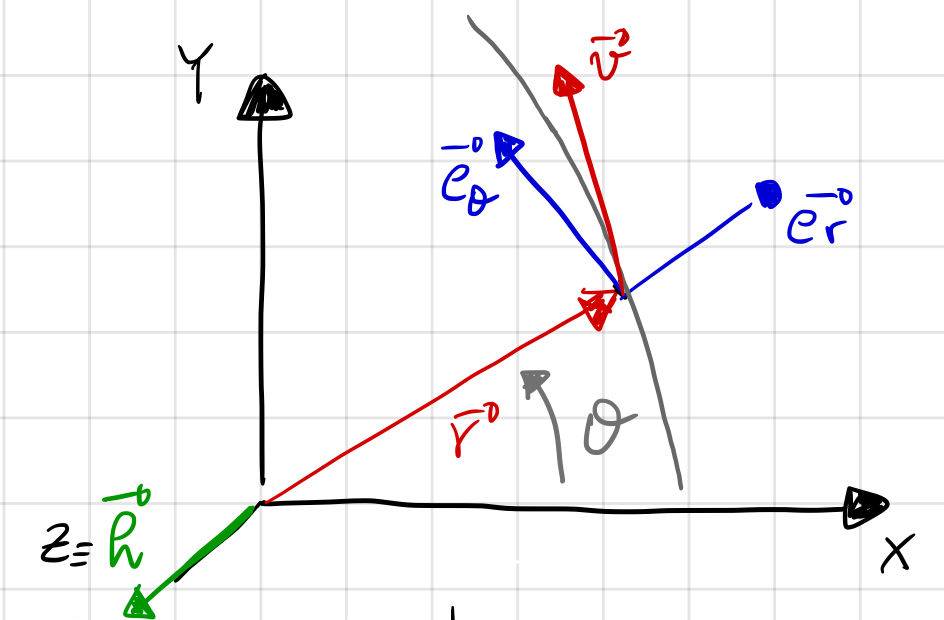
Fig. 5 Polar coordinate system (in blue) to study the two-body problem.#
Using polar coordinates shown in Fig. 5, we can see that \({\bf r} = r{\bf e}_r\). Thus
which allows us to write
or
where \(\hat{\bf{k}}\) is a unit vector orthogonal to \({\bf e}_r\) and \({\bf e}_\theta\). Further, we can substitute for \(h\) from (55) into to (52), which gives
Taking the second derivatibe of \(\bf r\) using (53), we get
We can also write the RHS of (31) in polar coordinates as
which upon comparing to (57) gives the following two scalar ODEs along the \({\bf e}_r\) and \({\bf e}_\theta\) directions, respectively:
Note that the second of Equations (59) can also obtained from differentiating the specific angular momentum
In other words, the second of Equations (59) is equivalent to \(h = constant\).
Conservation of Specific Orbital Energy: \(E\)#
In this section we show that specific energies of orbits are constant, under two-body dynamics. To do so, we begin by computing dot product between \(\bf{\dot r}\) and both sides of the two-body dynamics equation (Equation (31)):
Further, we note the following
The derivative on the RHS of Equation (62) also yields
This tells us that the term on LHS of Equation (61) can be written as shown below
Notice that this is the derivative of a term that resembles kinetic energy (but lacking a term for mass).
Note
In polar coordinates \(v^2={v_r}^2+{v_\theta}^2={\dot r}^2+r^2\dot \theta^2\)
Further,
Noting the above and observing that \({\bf \hat{r}} \cdot {\dot{\bf r}} = v_r = \dot r\) , the term on the RHS of Equation (61) is rewritten as below
Important
Notice that the term on the RHS of Equation (61) has been recomputed as the derivative of the potential of the gravitational force.
Substituting the derivatives of kinetic Energy (64) and potential of gravitationl force (66) into (61) gives
from which follows the Conservation of Specific Orbital Energy (68):
where \(E\) the specific orbital energy is given by